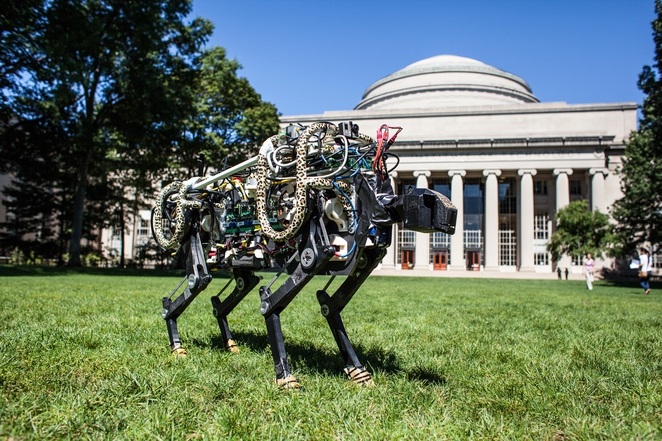
MIT researchers have developed an algorithm for bounding that enables their robotic cheetah – an assemblage of gears, batteries and electric motors that weighs about as much as its feline counterpart – to run and jump, untethered, across grass. The team recently took the four-legged robot for a test run where it bounded across the grass at a steady pace. Check it out… The key to the bounding algorithm is in programming each of the robot’s legs to exert a certain amount of force in the split second during which it hits the ground, in order to maintain a given speed: in general, the faster the desired speed, the more force must be applied to propel the robot forward. Sangbae Kim, an associate professor of mechanical engineering at MIT, says that by adapting a force-based approach, the cheetah-bot is able to handle rougher terrain, such as bounding across a grassy field. In treadmill experiments, the team found that the robot handled slight bumps in its path, maintaining its speed even as it ran over a foam obstacle. In experiments on an indoor track, the robot sprinted up to 16 km/h – even continuing to run after clearing a hurdle. The researchers estimate that the current version of the robot may eventually reach speeds of up to 48 km/h. - See more at: http://www.popularmechanics.co.za/tech/robotic-cheetah-can-run-and-jump-across-grass/#sthash.vbx4fXQl.dpuf
 RSS Feed
RSS Feed